
全球范围内来看,智能网联汽车的发展是如火如荼。作为智能网联汽车区别于传统汽车的重要特点,智能辅助驾驶也被放到了媒体的聚光灯下:“某车型发布了L2高级辅助驾驶”、“某车型在某国获得了L3能力的认证”、“某厂家旗下某新车开始搭载激光雷达”……
如此种种与智能辅助驾驶相关的消息可谓是层出不穷。

作为智能驾驶重要的一环,环境感知无疑会被用户高度关注,作为消费者的你可能会有一列的问题:什么是环境感知?谁需要环境感知?他们对环境感知有什么诉求?环境感知的现状与未来是什么样的?今天,我们就一起来好好聊一聊!
1、什么是环境感知?
环境感知指的是智能汽车通过搭载在车内、车外、以及道路上的传感器,对车内人员、车外车辆、人、自然环境进行识别的能力,该能力不仅在大家耳熟能详的“自动驾驶”中使用,还在驾乘舒适性、安全性等方面默默地发挥着作用。根据感知对象的差异,环境感知可以分为车内环境感知和车外环境感知。
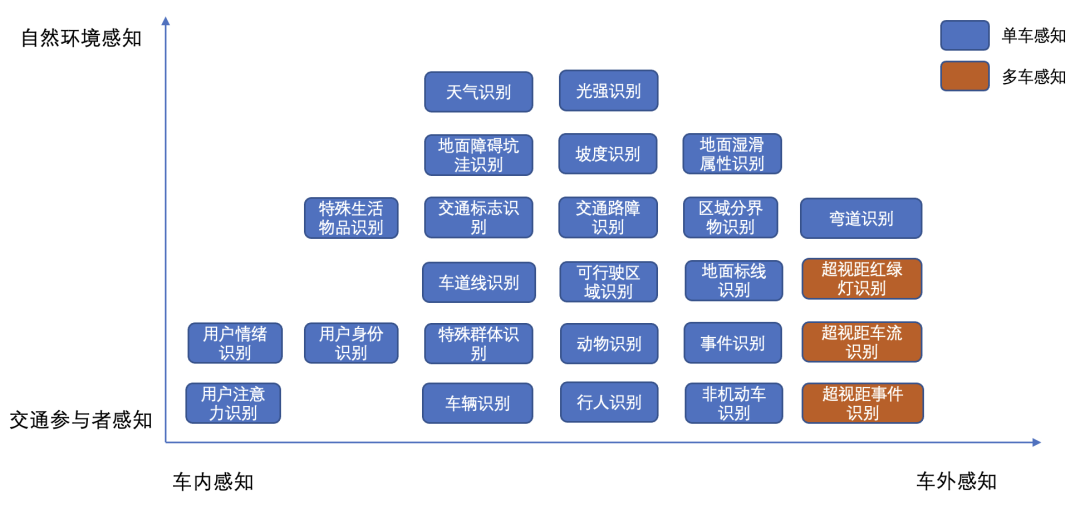
车内环境感知包含:驾乘人员舱内位置分布识别、驾乘人员视线识别、身份识别、舱内特殊人员如小孩子遗留情况识别等。

车外感知则分为动态交通参与者感知,其他车辆、行人、非机动车的位置状态、速度等属性识别,静态交通要素感知:车道线、交通标识等识别,自然环境感知,前方地面颠簸、坡度情况、地面雨雪湿滑情况识别,道路中石块、杂物遮挡物存在情况的判断等等。

根据传感器位置的分布情况,环境感知又可以分为单车智能感知、多车协同感知。
2、谁需要环境感知,他们对环境感知有什么诉求?
环境感知的需求者,便是智能网联汽车设计定义、投产制造、销售过程这个迭代循环的参与者,大致可以概括为三方:用户、车企、产业,三者的关系如下图。

那么,这三方在这个迭代循环过程中有什么诉求,对环境感知又提出了什么诉求?首先是消费者。试想一下,消费者购车过程会考虑哪些核心因素?
品牌调性、底盘舒适性、续航、外观、内饰、科技感、安全性等等,都是消费者购车的关注点。概括起来分为5种需求:以操控性、舒适性、续航、动力、空间等为代表的驾乘基本盘需求,以碰撞提醒、主动安全等为代表的安全性需求,以辅助驾驶等为代表的便利性需求,以品牌调性、科技感等为代表的情绪性需求,以及部分消费者以行业发展为代表的社会性需求。

其次是车企。车企的核心诉求是盈利,盈利离不开两个点:规模效应、品牌溢价。规模效应是降低成本的核心,需要简化生产工艺、优化供应链、简化零件数量等;品牌溢价是车企获得高利润的重要杠杆,品牌溢价包括以续航、底盘、智能化构建的技术溢价,以及以车主社群、服务、文化调性构建的情绪溢价。最后是行业。智能网联汽车能够发展起来离不开行业政策的推动以及各种行业引导基金的影响。政府以智能网联汽车发展为依托,进行长远的行业能力建设并促进社会发展,创造地区就业,获得出口,促进中等制程芯片(处理器、SiC)制造、电子与传感器产业、能源产业的长期发展,背后是产业升级、是生产力提升、是国家安全、是人民生活水平提高的诉求。
将这三方的诉求放到一起,你会发现:其中一些诉求和各参与方产生不同程度的交叠,交叠越多,关注度越高。

与此同时,将环境感知基本组成与三方诉求进行结合,你还会发现一些高价值的技术与产品功能,这些碰撞点对于我们理解环境感知的现状和未来非常有帮助。基于各参与方对车的诉求以及环境感知的基本特点,可以总结出以下的诉求交叉点:智能底盘、主动功能安全/危险提醒、辅助驾驶/人机共驾、个性化设计/个性化服务、尖端传感器等。接下来我们将围绕这些诉求交叉点来探讨环境感知的现状与未来。
3、环境感知的现状与未来
(1)主动安全相信现在的大多数消费者购车时最关注的点之一便是车辆的安全性,而一辆车的安全分为两种:被动安全与主动安全。被动安全指的是:当安全事件发生后,车辆能够提供给用户的安全保障:如撞车事件发生后,特定刚度的车架、特定的吸震区域、安全气囊、安全带防止或减少用户在事件中受到的生理伤害。主动安全指的是:当事故即将发生但尚未发生时,车辆就识别到危险,并通过主动介入控车或报警的方式,来防止或减少用户受到生理危害。主动安全一般的流程分为危险识别与危险响应:危险识别是利用传感器和算法来判别场景的危险程度、危险的发生位置;危险响应是系统介入车辆控制如转向、刹车,或者进行报警提醒。其中,危险识别便依赖于环境感知。根据主动功能安全响应的危险对象大致可分为自然环境、交通参与者主动功能安全。其中,自然环境相关的主动功能安全需要识别前方道路是否有异常的物体、前方是否是湿滑路面等,这一类自然环境感知主要是对静态的事物、材质进行感知;而交通参与者的感知主要是对道路上的运动或静止车辆、行人、三轮车非机动车等进行感知,感知的内容包括交通参与者的距离位置、速度、类别等属性。举例来说,比较成熟的主动功能安全是自动紧急制动AEB,即当环境感知发现前方有车辆或行人急刹车、静止或横穿时,本车会适时地进行减速或刹车,从而避免或减弱本车与交通参与者的碰撞。
而要实现AEB,环境感知便需要对前方交通参与者的位置、速度、类型进行识别,一般依赖摄像头、毫米波或激光雷达传感器。

而为了让车辆对更多、更复杂的安全风险进行识别,环境感知的发展在感知粒度、时间维度、感知精确度上还需要向更细、更广、更准的方向进行发展。感知粒度方面,早期的AEB只需要识别交通参与者的位置、速度、类别这些基本属性,后期可能需要更细粒度地识别交通参与者各种状态,如是否开门、是否有延伸物、是否打转向灯、行人的头部朝向、肢体状态等。感知时间维度方面,从识别交通参与者当下是否已经存在于危险区域,发展为识别交通参与者未来是否处于危险区域,例如对一群小孩子在马路边跑动这种潜在风险事件进行预先识别。而在感知精确度方面,从早期的交通参与者相对本车位置的米级误差的识别,发展到厘米级别误差识别,如在狭窄道路错车场景,对其他车辆的后视镜到本车A柱的距离进行厘米级识别。
(2)辅助驾驶/驾驶推荐
在用车过程中,消费者会有介于身体需求和精神需求的中高阶需求产生,以便减少驾车的疲劳、焦虑感。随之而来的便有如下这些功能:帮助用户泊车的辅助功能、减少用户长程驾驶疲劳以及复杂道路变道紧张度的辅助驾驶、城区低车流情况下的最佳速度推荐以便让用户能够在保障安全的前提下减少等待红灯的数量的同时也降低等待焦虑,甚至还能提升城市整体通勤效率。这些精神需求的满足,都离不开全要素、全视角、超视距的环境感知。首先是泊车辅助。随着用户对车内空间需求的增长,车企发布的新车体型越来越大,车辆的视野盲区也增大,这无疑提高了泊车的难度,随之而来的解法是泊车辅助:依赖对车辆周围近距离、高密度、高精度的墙体、车辆、车位线等感知,可以降低用户对泊车过程的焦虑。其次是辅助驾驶。
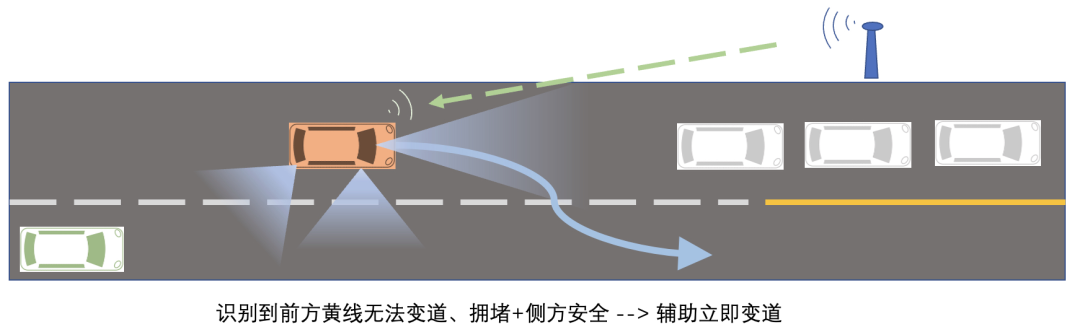
对于缓解长程驾驶的疲劳以及用户在复杂道路下的变道焦虑,车企给出的方案是提供辅助驾驶或变道推荐(驾驶员仍然需要适时介入):利用环境感知对地面车道线、标识等识别,以及对本车道、相邻、周边车道的车辆、行人等交通参与者的属性、意图进行识别,并结合感知信息对车辆的方向、油门等进行控制以让车辆在本车道内自动行驶,或者是结合导航与感知到的车周危险状况提示是否应该进行立即变道。而为了减少用户在城区通行的平均等待红灯时间,诞生了最佳速度推荐功能,这都依赖于超视距的车流密度感知、红绿灯时长感知。目前,超视距感知还在起步阶段,主要依赖多车感知,以及固定在道路上的基建传感器:多车感知是指通过多辆车辆、云端服务器进行组网,共享感知信息,实现超视距;依赖基建传感器的感知,是指将传感器(如摄像头、激光雷达)架设在道路特定位置,对环境进行感知,或直接接入红绿灯的时长信息,并将该信息通过无线网下发到附近范围的车辆,实现超视距感知。
超视距感知依赖统一、安全的车辆与车辆、车辆与云端的网络协议与硬件,即大家常提到的V2X协议,以及相关的通信技术如5G等。
可以看到,为了帮助用户缓解各种驾驶疲劳与焦虑,环境感知逐渐从简单的交通参与者感知,扩展到全视野角度、全要素、超视距范围的感知,依赖的传感器也从单车搭载的传感器扩展到多车、基建网络型传感器。
(3)智能底盘
底盘是一辆车的基石,它是承载用户安全、舒适性的重要基础。一个好的底盘,应该既能给用户提供良好的滤震,又能在转向的过程中提供良好的刚度,防止侧倾。但现实中,这两者往往是相悖的,也正因为这两种场景非常难以调和,大部分车企将场景的切换权利给到了用户,让用户自己选择用车模式:舒适模式下,底盘软,滤震效果好,但是过弯容易侧倾;运动模式下,底盘硬,侧倾小,但是地面的震动会比较敏感地传递到用户,舒适度一般。
那么,有没有一种方法让底盘的软硬能够随用户所需自动切换呢?有!这就是智能底盘。智能底盘可以结合安装在车辆的传感器识别当前场景对底盘软硬的需求,并进行自动调节。举个例子,车辆通过减速带时,当前一些具备智能底盘的车辆,会结合悬架上的震动传感器判断车辆是否经过了类似减速带的场景,并在毫秒级时间内将悬架的阻尼调小,让底盘比较平稳地通过减速带。这种在震动发生后才做出悬架调整的方式称为半主动悬架,目前一些中高端车上已经配备。
由于半主动悬架只能在震动发生后做出响应,其悬架的调整还是存在一些延迟,体感上还是存在缺陷。于是,为了让用户有低延时、更平缓的避震体验,主动悬架出现了。

主动悬架是在车辆还没有行驶到震动物体(如减速带、碎石)时,就提前感知到车辆前方的路况,适时舒缓地提前减小悬架的刚度,从而让用户几乎无感地度过震动区域。

除了在滤震方面可以发挥作用之外,在增加底盘刚度方面,主动悬架也有它的优势。譬如,当用户以一定速度通过弯道时,主动悬架会提前判别到车辆即将进入弯道,提前平缓地增加底盘刚度,防止转向侧倾,并在用户出弯后自动降低底盘刚度至舒适态。那么问题来了,主动悬架是怎么知道前方道路的颠簸情况、弯道情况的呢?核心依赖是环境感知,特别是环境感知中的自然环境感知。自然环境感知是利用摄像头、激光雷达、双目传感器等非接触式传感器来获取道路环境的3维几何信息、颜色纹理信息、甚至是材质信息。例如:通过摄像头及配套的图像识别算法,来识别前方是否是弯道,以及弯道的曲率是多少;采用激光雷达与摄像头结合的建模算法对道路的3维形状建模,识别减速带、路面颠簸、泥土等特殊材质路段情况等。可以推测,为了让底盘能够更敏锐、更精确地调整阻尼、刚度,环境感知会向着更细粒度、高精度、更多维度的感知方向发展。从早期大致知道前方有弯道、有减速带、有水坑,到后期具体知道弯道到本车的距离、弯道的具体曲率,甚至到减速带的精确高度、道路的颠簸系数、路面的摩擦系数等,环境感知在与动态体验进阶的进程中也发挥着不可忽视的作用。为了顺应这种更高要求的环境感知,环境感知的传感器会逐渐从早期的纹理性2维传感器,发展到带深度信息的稀疏3维传感器,绸密度更高的3维传感器,以及对材质进行有源感知的4维传感器。对应的感知算法也会从粗粒度的场景识别,到更细粒度的分区域的多场景识别、几何建模、材质建模等。
(4)智能个性化
用户的需求一直在升级,由过去的硬件需求逐渐扩展到现在的情绪、社会性需求:用户开车不仅仅要满足通勤的基本需求,还需要让自己心情愉悦,以及获得一些优越感。这类需求的满足,除了车企自身提供的品牌情绪价值之外,还离不开车辆产品提供的个性化能力,如车辆的个性外观、个性仪式感等。为了提升这些个性,车企一般会发布多种颜色外观、内饰等静态个性配置,但静态个性配置的排他性还是有上限,无法洞察用户不同时刻变化的个性化需求,因此,智能个性化应运而生。智能个性化是指通过对用户的车外、车内的行为、状态识别,提供用户足够的动态个性体验。
逐渐显现的动态个性化主要有用户进车前的灯带微微闪烁、门把略微凸起的仪式感;家人一车多人使用场景下的驾驶员身份识别,通过识别驾驶员是男主人还是女主人,可以自动记忆并复原车主的车辆个性化配置,如座椅、后视镜高度,驾驶模式、喜欢的车内音乐等;与驾驶员情绪相呼应的动态氛围灯或动态香薰,当车辆识别到驾驶员或舱内人员有高兴、焦虑、烦躁等情绪时,可以动态的调整氛围灯的颜色、香薰的品类与味道来帮助用户降低负面情绪。
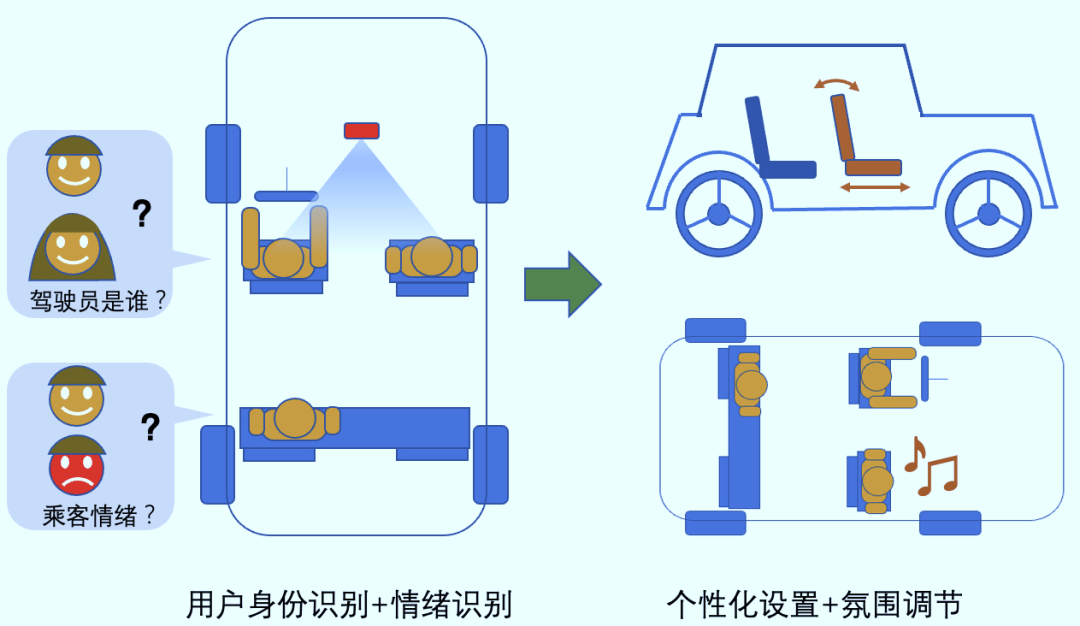
这些智能个性化的实现,主要依赖的是车周、车内的环境感知:如车辆周围的行人身份识别,车辆内部的人脸身份识别、基于视觉或声音的人员的情绪识别,当然,感知的范围也从车外演变到车内,从人的外在属性延伸到人的内在状态。
(5)产业发展需求
汽车产业的发展离不开政府的导向与推动作用,背后的原因是多样的,核心来讲,除了政府希望以此推动社会各阶层人民有更好的物质生活,还需要为提高社会生产力、科技发展、综合国力、国防安全服务。可以说,汽车产业是一个一举多得的产业,从提高社会生产力、科技发展的角度来讲,国家会通过政策、各种政府引导基金间接引导车企使用更多的高科技技术或元素,如环保的车内材料,一体化的车体成型技术,以及新型传感器和与之配套的计算芯片。
针对环境感知,上文提到的高分辨率的摄像头、激光雷达、多车通信网络、交通参与者识别,背后都能找到支撑的科技产业,如传感器半导体材料、传感器加工、芯片设计与制造、网络通信与基建产业等。

可以预见的是,以产业发展为驱动,未来的环境感知可能会出现:更多的新型材料、新型端侧芯片驱动的传感器,如高动态强光&夜晚低光照摄像头、穿透雨雾的传感器、绸密度更高的3维传感器、材质敏感的传感器;高精密高算力计算芯片驱动的新型感知元素,如复杂工况的撞车事件预判、结合行人脸部特征的行人意图识别等;高科技基建驱动的协同感知,如低延时的事故、路况数据上报网络。结束语环境感知现状与未来的演变,本质上是由消费者用户、车企、政府之间的交互来推动的。核心推动力是以人为本、国家产业升级的需求:从人的底层物质需求、安全需求,逐步扩展到人的情绪需求、精神需求,从个人需求扩展到社会产业的发展需求。理解到背后需求的变化,就能够理解环境感知的演变路径:从车外感知到车内感知;从交通参与者粗粒度感知,到自然环境与交通参与者的全要素、细粒度、高精度、超视距感知。(本文摘自《一本书看懂智能网联汽车》,如果你对智能网联和自动驾驶感兴趣,可以关注!)
原文标题 : 科普 | 6000字长文聊智能网联汽车环境感知的现状和未来










