-
自动驾驶革命:解密端到端背后的奇迹

 3月6日
3月6日 -
汽车软件开发模式的7个特点


 11月7日
11月7日 -
激光雷达传感器在车辆限高应用


 8月27日
8月27日 -
TVS器件的选择如何解决汽车负载突降难题?
3月28日
-
详解车道线检测算法之传统图像处理
10月6日 -
自动驾驶中与LIDAR有关的主要设计考量
9月27日
-
华为提出适用于弯道的车道线检测方法
9月6日 -
高效AI计算打造智能汽车全场景感知解决方案

 11月16日
11月16日 -
蚂蚁研究有助避免交通堵塞
11月11日 -
自动驾驶安全 底层传感器信号链才是关键!
11月4日 -
深度学习技术在自动驾驶中的应用

 10月28日
10月28日 -
无人驾驶的大脑——AI芯片
 10月26日
10月26日 -
激光雷达能否识别“世界上最黑的汽车”
9月16日
-
自动驾驶汽车基础设施的新视角
9月7日 -
特斯拉、吉利车上的那些ADAS系统你都会用吗?
8月20日 -
不需GPS和惯导,实现激光雷达SLAM

 7月6日
7月6日 -
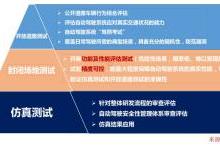
车路协同封闭测试发展现状

 6月26日
6月26日 -
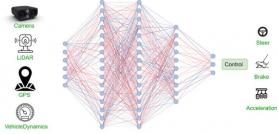
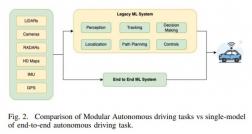
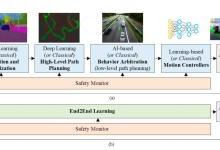
自动驾驶汽车的端到端学习

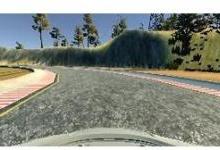
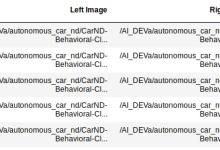 5月30日
5月30日 -
MIT利用粗粒度地图实现自动驾驶
5月29日 -
GM Cruise AV:真正的无人驾驶汽车
 5月27日
5月27日
上拉显示更多