本文通过两步定义候选点的中心标签:
1. 确定该点是否在一个目标中;
2. 计算该点到这个目标六面体上下左右表面的距离,再通过以下公式得到 l_ctrness:

损失函数
全部损失函数分为分类损失、回归损失和偏移损失(这个是指从采样代表点到候选点得到时的损失函数)。

其中 N_c 为候选点的个数,N_p 为勾选点中前景点的个数,N_P^* 表示 F-FPS 采样得到的候选点。分类损失采用的是交叉熵函数,s_i, u_i 分别表示预测得分和中心性分数。回归损失包括距离回归、大小回归、角度回归和角点回归。
论文实验
本文实验使用了 mix-up、随机旋转平移、x 轴尺度变化、z 轴旋转四种数据增强方法。在 KITTI 和 nuScenes 两个数据集上进行了实验。

为验证各模快的有效性,本文还进行了消融实验。

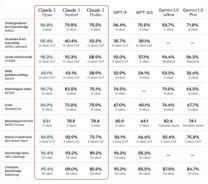
值得注意的是,本文的方法甚至可以与基于体素的单阶段方法保持相似的 inference 速度。在所有现有方法中,本文的方法仅比 PointPillars 慢,而 PointPillars 已通过多种实现优化策略(例如 TensorRT)进行了增强,但是在本文的实现中尚未使用。本文的方法仍有很大的潜力可以进一步加速。
结论
本文首次提出了一种轻量级且高效的基于点的 3D 单阶段目标检测框架,并引入了一种新颖的融合采样策略,以删除费时的 FP 和优化模块。在预测网络中,候选生成层利用降采样的代表点进一步降低计算成本。本文提出的带有 3D 中心标签的无锚回归头提高了最终性能。所有这些有效的设计使本文的模型在性能和 inference 时间方面都表现更加出色。