
平行驾驶理论是基于信息物理社会系统(CPSS)通过将人工系统与真实系统虚实结合起来,它利用ACP (Artificial societies, Computational experiments and Parallel execution)方法,通过人工系统对实际无人车和路建模,构建软件定义车辆及车路系统,同时建立控制计算中心,对无人车和道路采集的真实数据及人工系统的虚拟数据进行联合优化,保证无人驾驶更高级别的安全性,同时对单车进行相应的改造,从而降低车辆成本。平行驾驶充分利用了全球数字化及信息化资源,将云端、道路及车辆上的资源无缝衔接,充分考虑安全性、舒适性、敏捷性和智能性等指标,将物理、社会、信息空间打通,从而有效保证车辆行驶安全与最优行车体验,最终实现可靠、舒适、快速的平行驾驶。
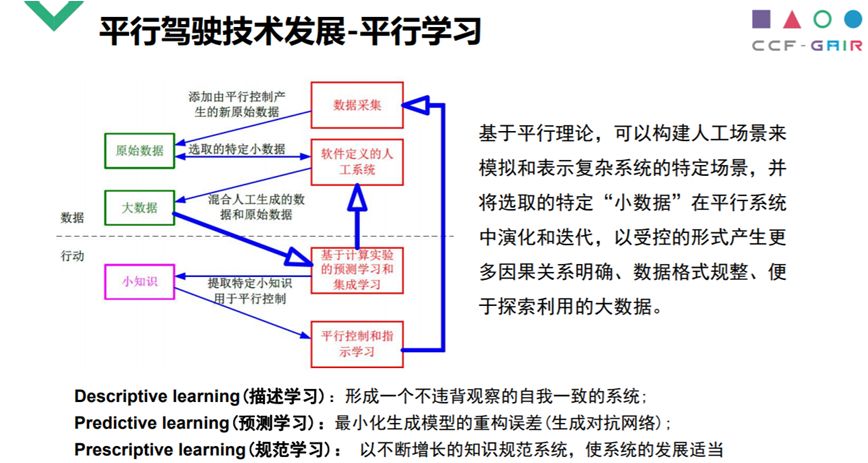
同时,无人车通过计算实验的方式把小数据导成大数据,大数据导成小智能,核心就是平行学习。基于平行理论,可以构建人工场景来模拟和表示复杂系统的特定场景,并将选取的特定“小数据”在平行系统中演化和迭代,以受控的形式产生更多因果关系明确、数据格式规整、便于探索利用的大数据。

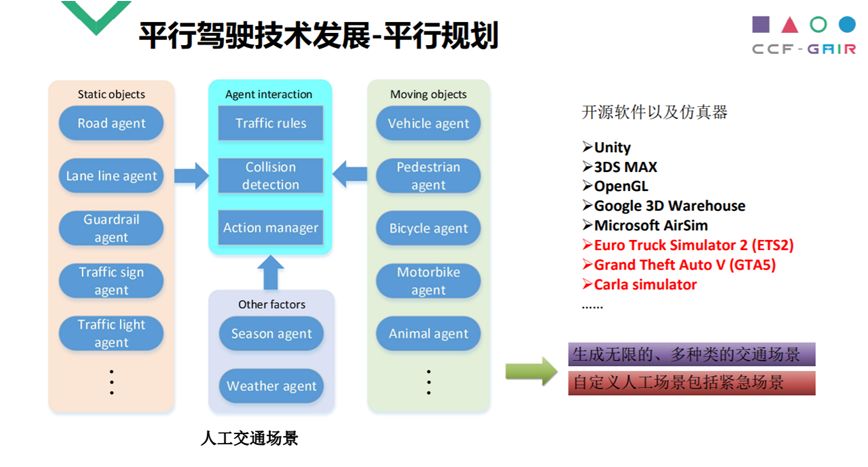
视觉也是平行的,无人车在物理世界开,先在人工世界试开,“要在人工世界吃一堑,物理世界要长一智”。平行视觉研究思路是针对视觉计算研究中存在的实际数据获取和标注成本高、难以覆盖复杂环境、极端场景样本稀少、训练的模型适应性差等问题提出的,采用Agent建模方法,模拟北京中关村区域和常熟智能车测试区域,在计算机上建立人工场景,设计丰富典型的环境条件和目标运动,生成带详细标注信息的图像数据集。
有了虚实互动的平行理念,感知、规划、网络、转向控制、测试都需要平行。“物理信号之外还要有社会信号、精神信号,还有情感信号,驾驶员、人机因素,以后人机因素多了,远端的人机因素,车内外的人机因素都要考虑。所以最后至少是四胞胎,双胞胎是不够的。
平行驾驶的应用
很多人听到这样的“平行驾驶技术架构”,“数字四胞胎”,“虚实互动”……第一反应是“这么庞大的工程该如何落地?”王飞跃教授也列举了一些具体的实例
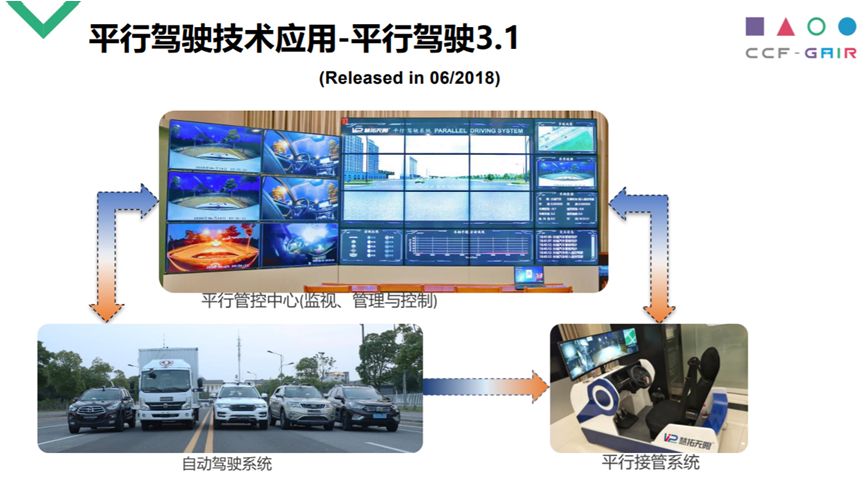
慧拓智能机器有限公司(VIPioneers)是一家以ACP平行理论为基础,致力于新一代云端化智能网联自动驾驶技术的研发及产业化的公司。今年3月18号,慧拓在中国智能车综合技术研发与测试中心(常熟)发布其 “第三代平行驾驶系统”,公开演示了“驾驶员”如何利用平行驾驶管控中心的遥控驾驶系统中远程管理并控制在真实道路上行使的多辆无人驾驶车。6月30日,在IEEE IV 2018 On-Road Demonstration国际智能车联合道路演示上,他们给全世界展示了平行驾驶3.1版,现场演示了一般交通场景响应式接管、紧急交通场景主动接管、主动避障、中心驾驶员实时状态检测四个部分。围绕“平行驾驶”框架的平行驾驶3.1系统,通过平行驾驶管控平台流畅的管理多台无人车,让无人车更安全平稳的在道路上行驶,这无疑是自动驾驶技术的落地提供了一种安全、可靠、高效的实施方案,实现道路上混合车辆系统(有人驾驶、自动驾驶、无人驾驶)的安全平稳智能管理,同期也成立了一个国际平行驾驶联盟(iPDA),由18所学校参加进来共享数据。

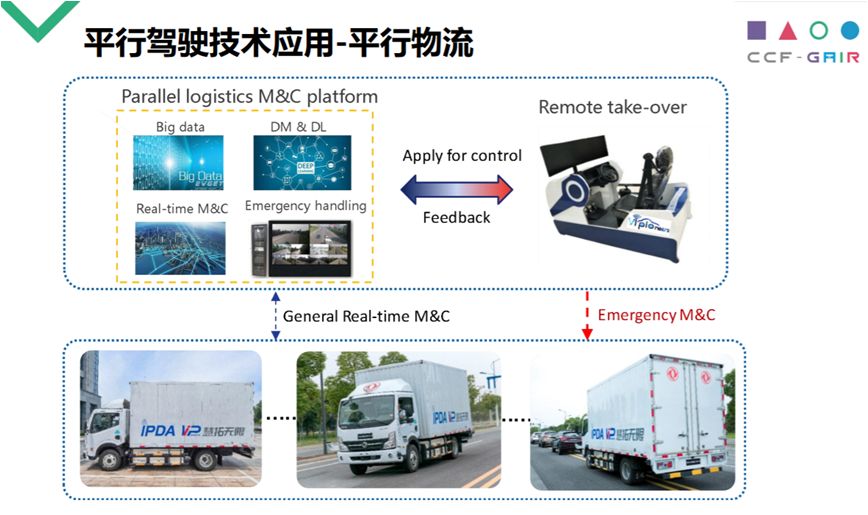
对无人车真正刚需的场景可能是矿山,矿山中使用的卡车非常昂贵,一部就要上百万美元,实现了自动化才能更高效,让软件定义的矿山与软件定义的大卡车,跟物理矿山和物理汽车一起运营。王飞跃教授表示:“慧拓己与中国最大的矿山卡车公司合作,后来也进入了物流领域,给东风提供平行物流的应用。物流、矿山这些场景有三合一的特色,即平常的运维、监控、应急三合一,非常适合应用平行驾驶。” ?
中国科学院自动化研究所、清华大学、西安交通大学联合研发了虚实结合的无人驾驶车辆平行测试平台。该平台建立了实际测试场地和任务的精确监控系统,利用高精度地图和高精度差分GPS记录车辆动态数据,通过车内和车外的视频监控采集驾驶环境数据,基于4G和V2X通讯实时传输这些监控数据,在云平台储存和分析数据和评测任务的执行情况。在这些数据的基础上,便捷地建立虚拟测试空间和任务。通过虚拟测试和实际测试的互动,不断迭代更新,提高虚拟测试中Agent行为的真实性,更好的拟合人类驾驶员、行人等和受试车辆互动行为。在对应的虚拟空间中,利用对抗式生成网络和平行学习的方式快速生成更多具有挑战性的测试任务,并通过虚拟测试探查当前的车辆智能系统面对这些测试任务的反应和结果。该系统在2017年中国智能车未来挑战赛中首次实战应用,虚实结合的无人驾驶车辆平行测试平台的这些优势已经得到了充分的体现。
“慧拓现在跟吉利汽车在宁波有五六千亩的测试基地,其中有1000多亩就是做虚实结合的,其它的部分做传统的测试。平行测试,要在虚拟空间吃一堑,要在物理空间长一智。基金委就此设了一个重大的项目,这个项目己顺利完成并被评优,因为确实它的效率很高,近年来连Google也开始采用,已成世界趋势。”
王飞跃表示,平行驾驶是在有人驾驶、无人驾驶、远程控制、网络驾驶之上的驾驶方式,平行驾驶中,驾驶的过程就是产生数据的过程,它把物理传感器获得的关于路况、关于车辆服务、关于车辆状态的信息,进一步加工,把这些物理世界得来的这种小数据,通过计算实验的方式,扩展成大数据,再用智能方法把这些大数据提炼成针对具体问题、具体服务的小智能、小规则、小知识,完成出行的智能控制,智能管理,让出行变得安全、舒适、敏捷、智能。平行驾驶的商业化应用过程中,应从小处入手,选取特定的场景比如园区、小区、港口、特种行业,行业也可以涵盖物流、配送、矿山等。
平行交通与智慧城市

谈到未来的智能交通,王教授提到:“目前交通正在走向交通5.0。最初,交通5.0是指城市交通、公共交通、静态交通、物流交通,以及社会交通一体化。但后来IEEE专委会讨论认为,应该从以前的机械化、电气化,信息化、网络化,进入到平行化,平行化就是智能化的技术途径。智能只是一个概念,如何实现虚实互动的平行智能,是我们需要思考的问题。
平行交通,是我们最早开始切入点,即软件定义的交通系统,人工交通系统与物理交通系统合二为一。这一系统平常可以用来进行训练、培训,还可以进行实验与评估。例如产生一个人工交通事故,通过观察这个人工交通事故的传播与影响,我们可以制定相应预防和解决措施。
在修路之前,我们也可以先在系统上修一条人工路,进行计算实验,观察道路的通行效果、最佳位置。而不是按照现在的经济利益,拍脑袋决定。也不是让人工交通逼近实际交通,而是让实际交通逼近人工交通,使之更加高效。针对平行交通,我们提出“五位一体”的应用,后来国家也对这个方案表示认可,成为发改委和交通部联合推出的青岛“多位一体”平行交通运行示范项目。
总结起来,当人有路权的时候,我们只能住在山洞里,住在树上,当马有了路权的时候,我们有了村落、乡镇,当车有了路权的时候,我们有了今天的大都市,只有当无人车有了路权,我们才能真正走向智能城市、智慧社会。将来,不仅会有交通的控制中心TOC,还会有车辆运控中心VOC,严格控制车辆上路,它将变得更加安全,甚至消除事故伤亡。”
最后,王飞跃教授用他曾在智能交通学会的理事会上的发言鼓励年轻人:“We should be the force to force others to change. For that, we must have and keep our own identity。我们需要我们自己的担当,特别是在座的年轻人,如果你们都顺着旧的思维,社会就不会有进步,那还谈什么创新呢?我希望年轻人能够有自己的担当,改变这个社会。”
作者:智车科技
